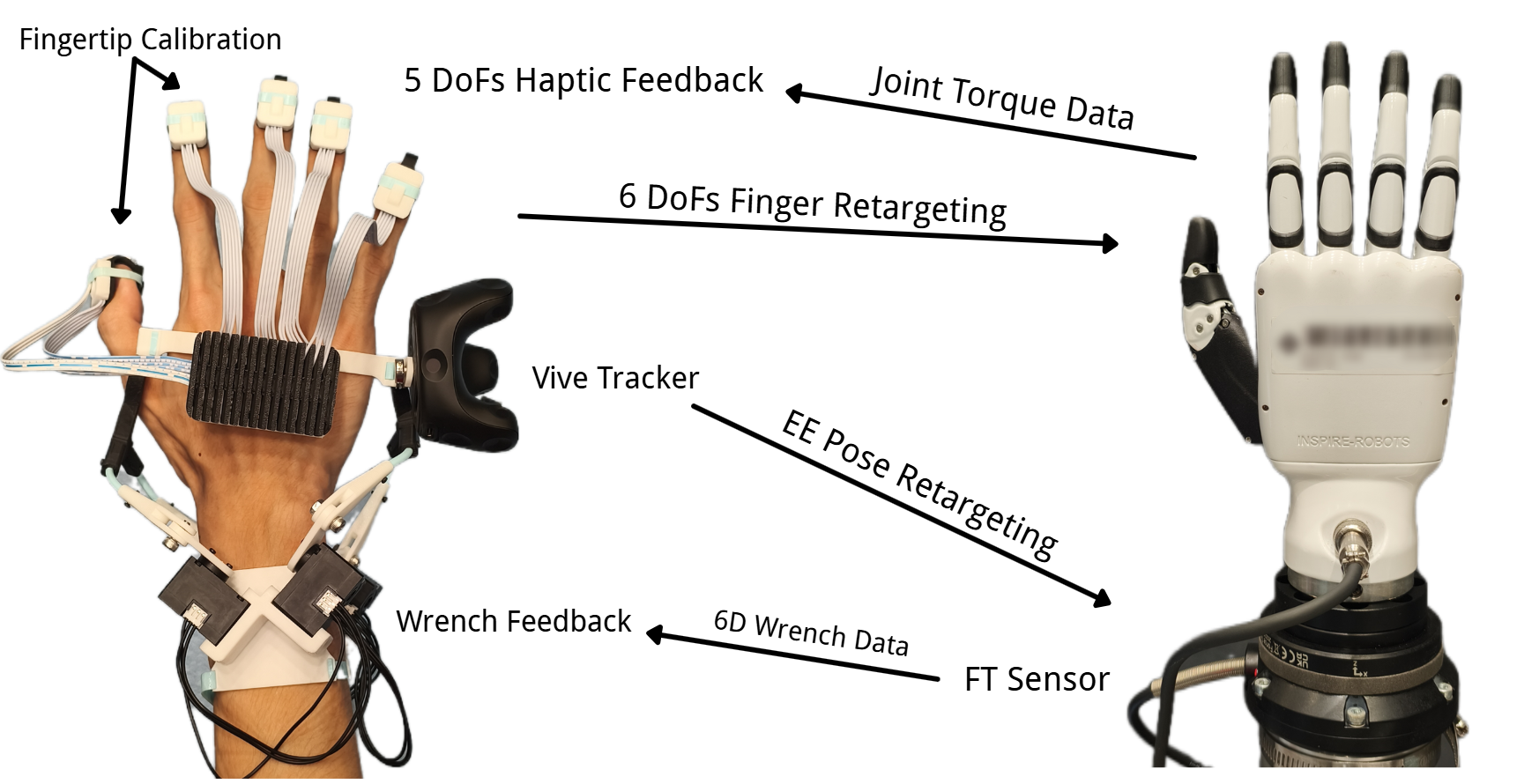
System Overview
Blindfold Mouse Swinging
Abstract
Wrench Feedback System
Finger Retargeting
Fingertip Hall Calibration
Haptic Feedback
Design Philosophy
Glovity's development is guided by three core principles that ensure both accessibility and high performance:
High Cost-Performance: The system achieves remarkable functionality at an unprecedented price point of approximately $300. This affordability is achieved through strategic use of minimal high-quality commercial components combined with 3D-printed parts, making advanced teleoperation technology accessible to researchers and developers worldwide.
Ease of Replication: All components can be easily obtained online or manufactured via 3D printing. The system adopts a modular, Lego-style design philosophy, enabling complete assembly in just a few hours with basic tools. This approach democratizes access to sophisticated teleoperation capabilities.
Versatility and Modularity: Glovity accommodates various hand sizes and integrates with diverse robotic platforms. The system operates at high frequencies (up to 100Hz) for wrench feedback, retargeting, and tactile feedback, ensuring responsive control across different manipulation tasks.
Wearable Spatial Wrench Feedback System

Four base feedback modes of the wrench feedback system
Imitation Learning
Adaptive Page Flipping: By integrating wrench data, the policy can learn to inference the next action based on the contact force and realize page turning at different heights.
Force-Aware Handovers: Integration of wrench data enables smooth object transfers between human and robot, with appropriate force modulation throughout the interaction.
Page Flipping
Force-Aware Handovers
Citation
@article{gao2025glovity,
title={Glovity: Learning Dexterous Contact-Rich Manipulation via Spatial Wrench Feedback Teleoperation System},
author={Gao, Yuyang and Ma, Haofei and Zheng, Pai},
journal={arXiv preprint arXiv:2510.09229},
year={2025},
}
This project represents a collaborative effort to advance the state of robotic teleoperation through innovative hardware design, sophisticated algorithms, and open-source principles. For more information, access to code repositories, or collaboration opportunities, please visit our project resources linked above.